Design and analysis compliant mechanism

This page presents a summary of my projects for 2.145 Design of Compliant Mechanisms over Fall 2024.
In this class, I learned to use techniques in design for compliant mechanisms such as Freedom and Constraint Topology (FACT) to design constraints for certain degrees of freedom, using stiffness matrices for analyzing parameters like force, energy, stiffness, and sensitivity, as well as Psuedo-Rigid Body Modeling (PRBM) to model large deformation of beams.
Here are my specific contributions to these group projects:
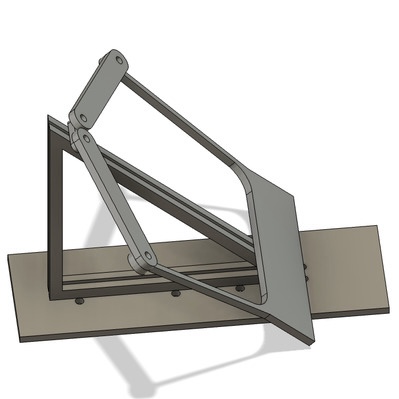
- Screw Motion: fabrication, modeling range of motion for specific load, and theta x stiffness
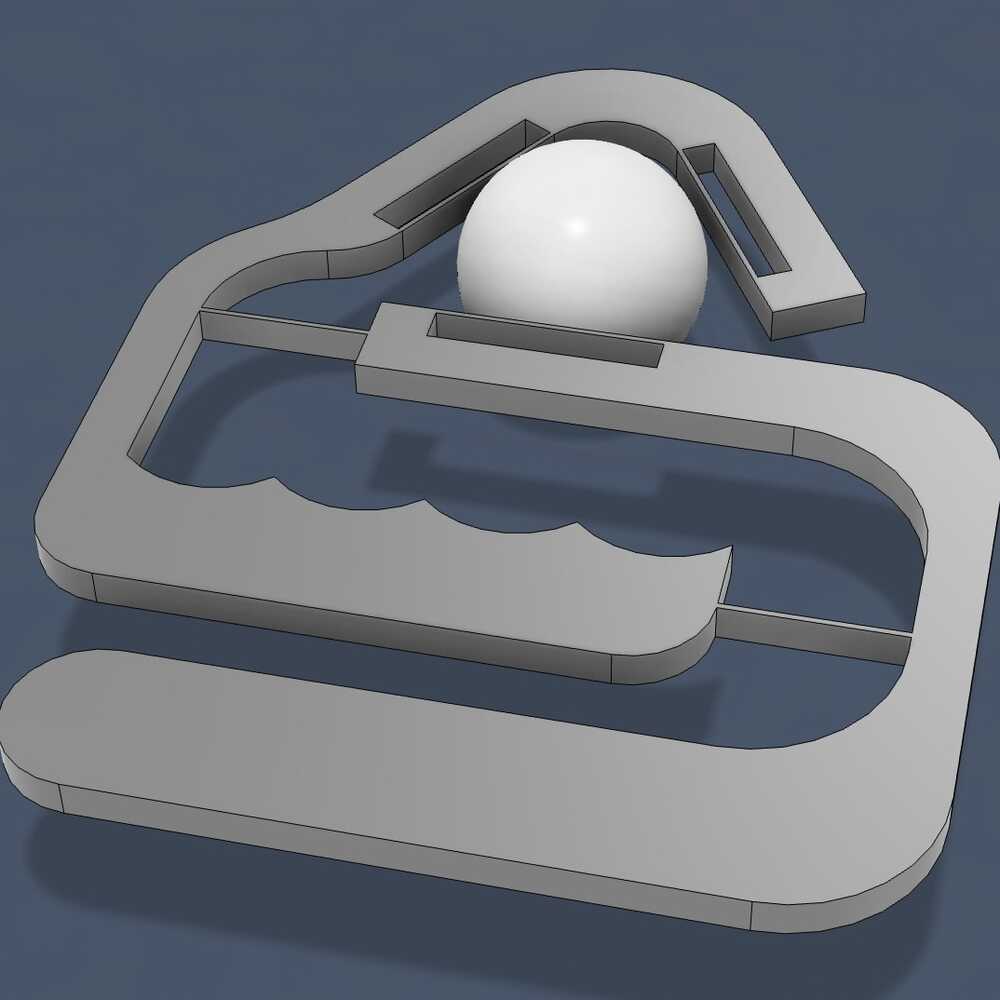
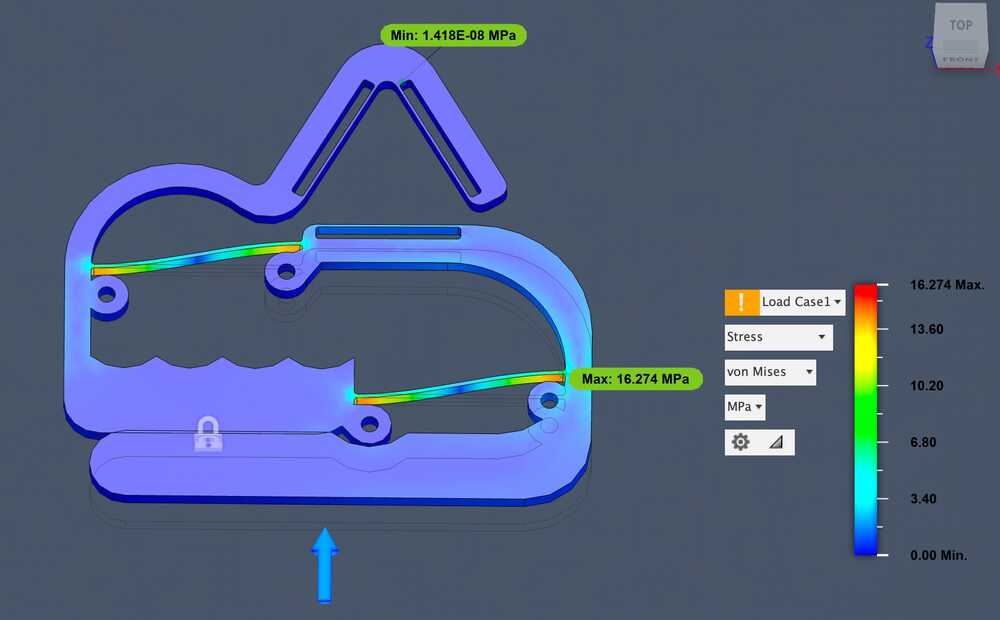
- Egg Gripper: modeling stiffness, energy, force applied, force exerted, and sensitivity using MATLAB
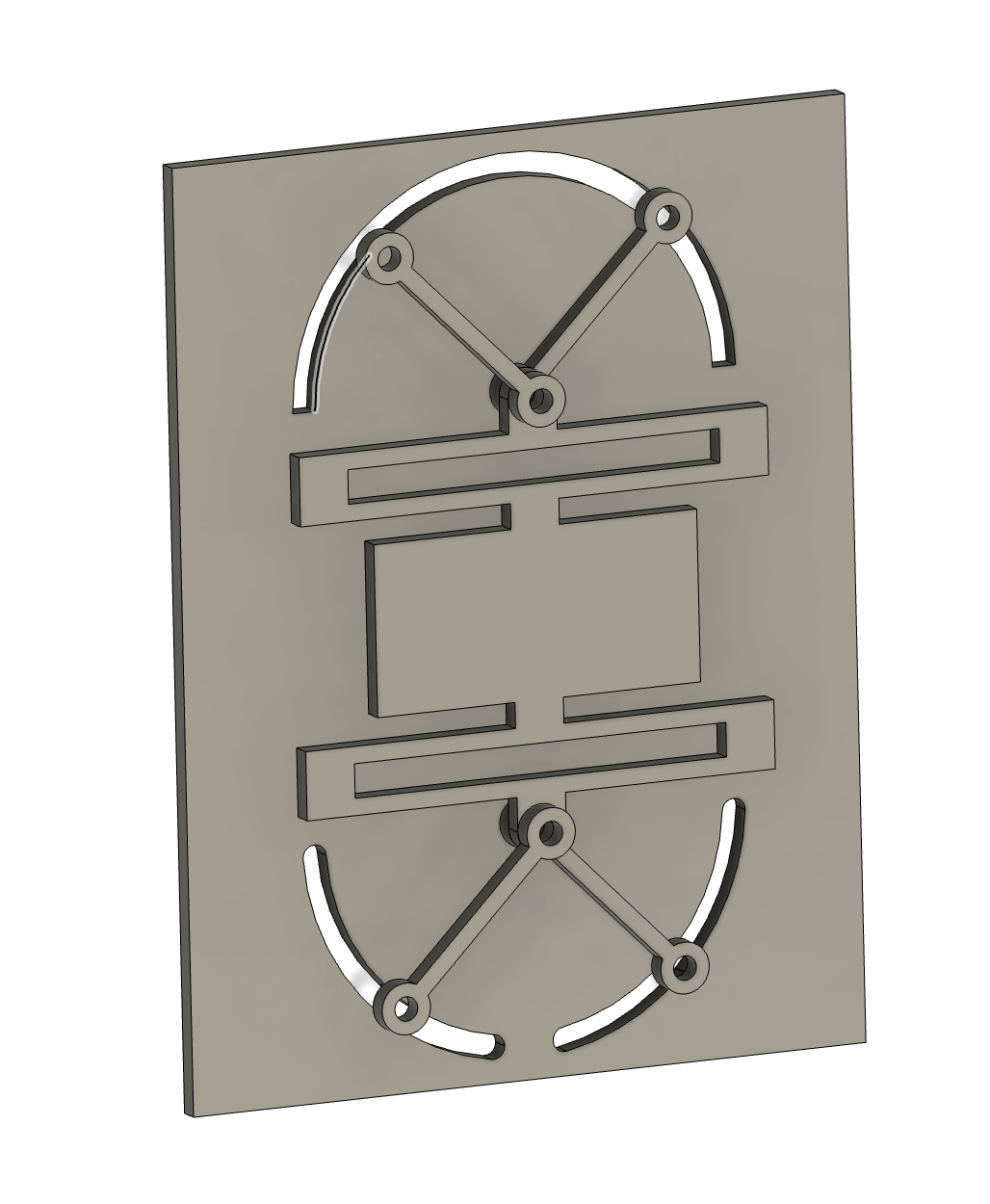
- Energy Harvester: CAD model, computing stiffness matrix, and symbolically solving specific stiffness
- Pencil Launcer: modeling stiffness, energy, force applied, force exerted, and sensitivity using MATLAB
Screw Motion Stage

Egg Gripper

Energy Harvester
Pencil Launcher
